Механический робот-паук на Arduino
Вы хотите оригинальный способ напугать кота? Или же вам нужно переправить вещь из одной комнаты в другую, не вставая с дивана? Тогда наше изобретение именно для вас!
Тестирование механического робота-паука
История проекта
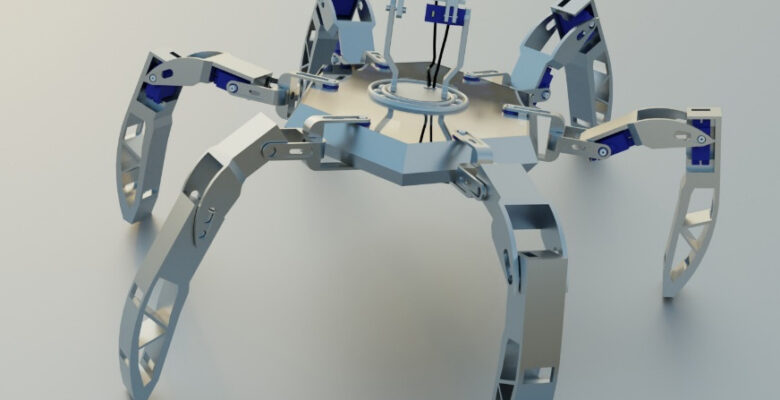
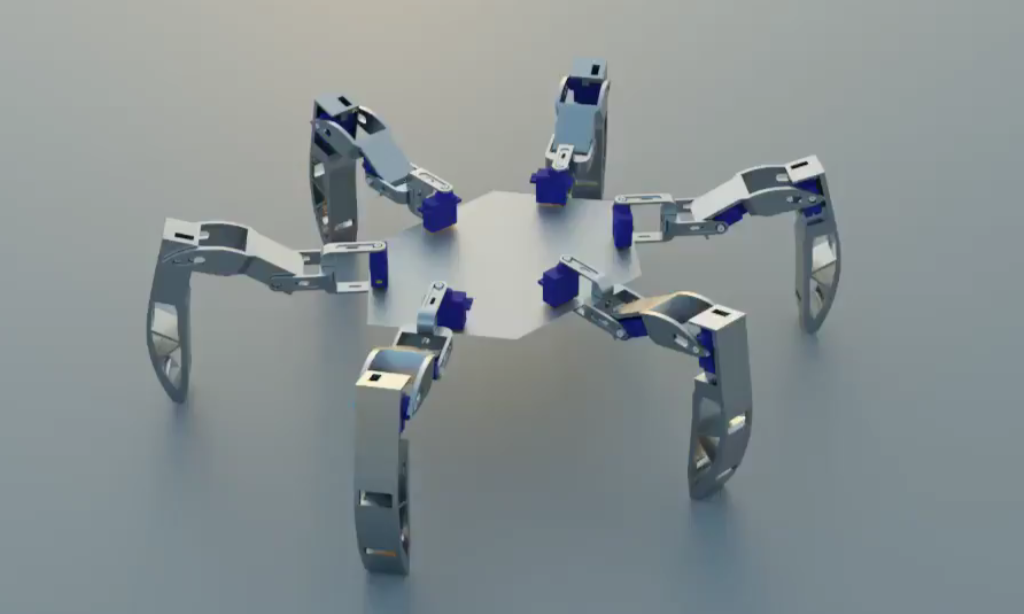
Все началось с того, что мы – пятеро студентов – решили сделать совместный проект. Часть нашей группы желала делать проект на «железе», часть хотела проект только на «софте». После долгого совещания мы пришли к компромиссу: создать робота на Arduino. Таким образом часть команды стала бы собирать робота, налаживать питание и тестировать его, а часть команды писать физику движения и распознавания. Спустя всего несколько дней была сделана первая визуализация робота-паука, а также разработаны первые модели деталей, и мы все загорелись этой идеей, сразу же приступив к разработке. Разработка проекта шла гладко, наш ВУЗ предоставил нам 3D-принтер, на котором мы напечатали лапы и корпус для нашего робота. Необходимое железо у нас было изначально. Одной из первых проблем после сборки робота, с которой мы столкнулись, была калибровка лап, но разобравшись со всем, мы смогли ее настроить должным образом. Затем проблемы были с одним из Финальная визуализация робота-паука сервоприводов: скорее всего он оказался бракованным – он не справлялся с подъемом лапы и перегревался больше остальных. Но несмотря на все трудности, мы завершили свой проект в срок, потратив на это чуть более 4 недель.
Описание проекта
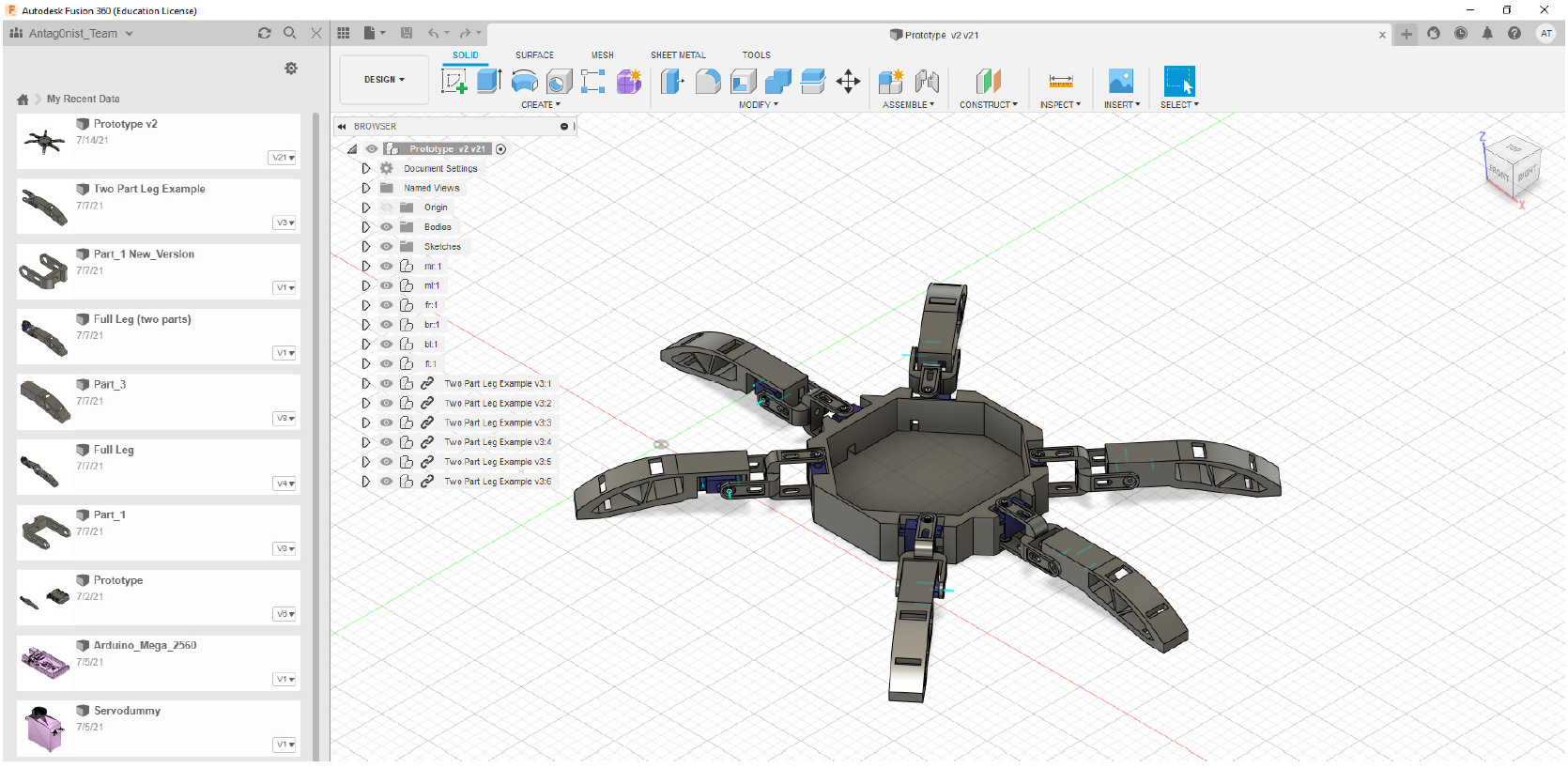
1. Изначальная конфигурация и первые модели
Составляющие робота:
- Плата контроля Arduino Mega 2560
- 12 сервоприводов
- Корпус, напечатанный на 3D-принтере
- 6 лап напечатанных на 3D-принтере
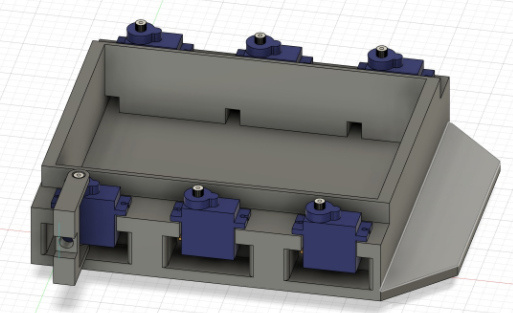
3D модель корпуса с сервоприводами 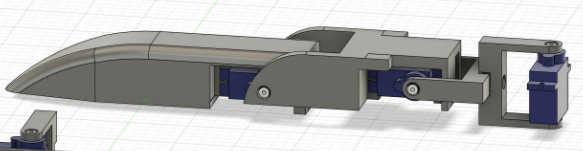
3D модель лапы 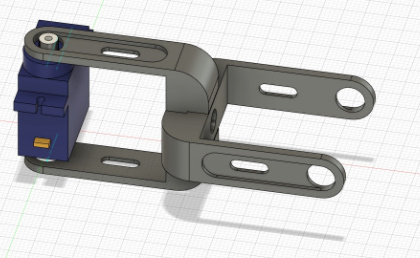
3D модель крепления сервопривода
2. Описание “железной” части
Основой управления роботом является плата Arduino 2560. Мы выбрали именно ее по причине большого числа пинов, потому что изначально робота паук разрабатывался с тремя сочленениями, что сразу увеличивало число сервоприводов до 18. А нам также хотелось оставить возможность присоединить различные датчики (изначально в задумке было несколько эхолотов). В качестве управления мы рассматривали Wi-Fi/Bluetooth связь, поэтому мы взяли плату ESP8266 версию NodeMCU представляющую собой отдельно программируемый модуль Wi-Fi.
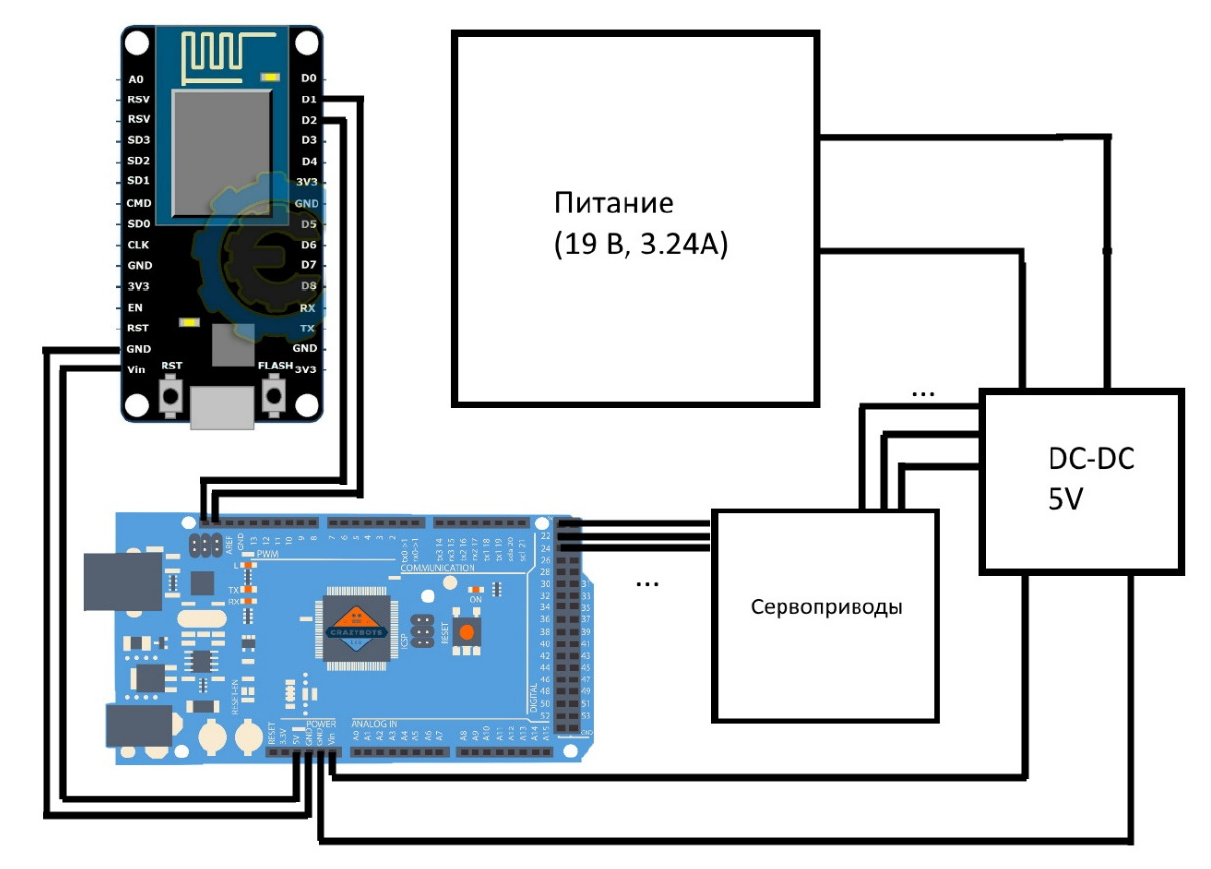
Одной из самых сложных проблем являлась проблема питания. Мы изначально не представляли где раздобыть 18А для параллельного подключения 18 сервоприводов (или хотя бы 14). Таким образом мы пришли к выводу, что сначала уменьшим число сочленений, но и это не решало нашу проблему. Попытки спаять усилитель постоянного тока не увенчались успехом (по большей части из-за неопытности в пайке схем). Итогом мы убрали две ноги оставив только 4. А в качестве основы питания взяли старый блок питания от ноутбука способный выдавать 19В и 3.24А. Снизив данное напряжение до 5 вольт, удалось получить ток около 6А, чего хватает для питания 8 сервоприводов (каждый сервопривод приблизительно 750мА).
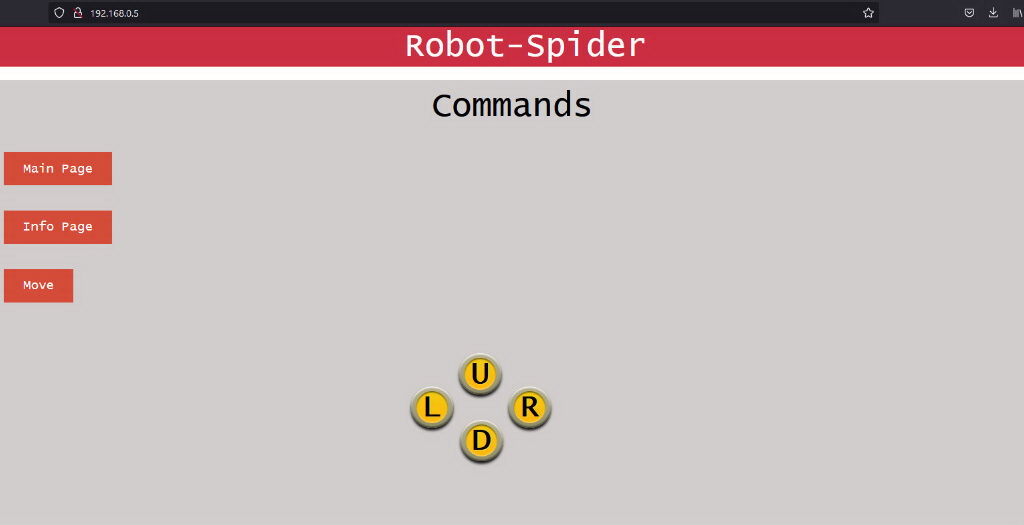
3. Описание программной части
Как уже было описано взаимодействие с роботом происходит через модуль Wi-Fi ESP8266 NodeMCU. Данная плата запрограммирована переходить в режим точки доступа. После подключения клиента появляется возможность зайти на сайт и управлять роботом с сайта. Помимо управления через сайт есть возможность передавать команды через программу, написанную с использованием библиотеки libcurl на С++ (библиотека собрана статически).
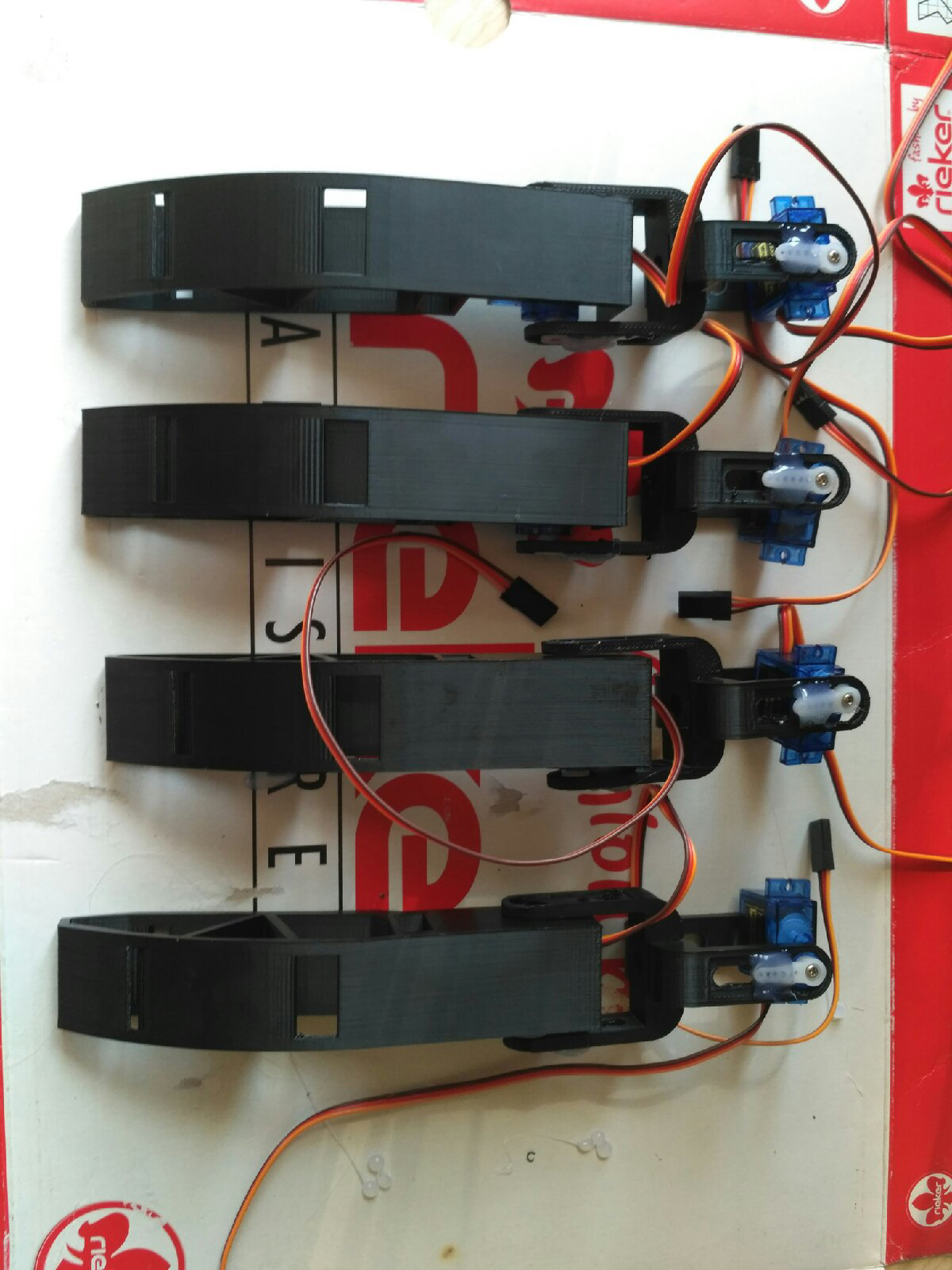
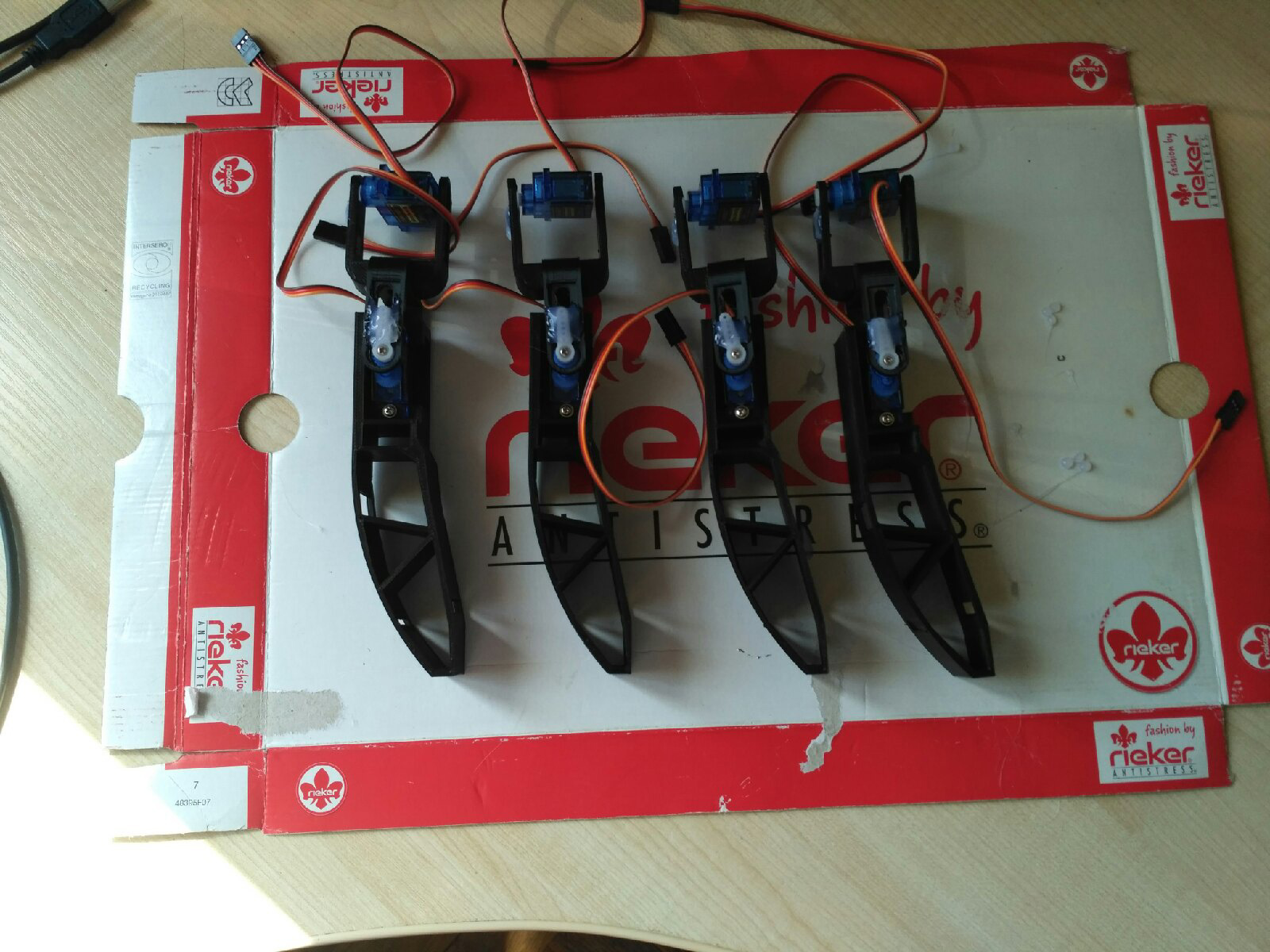
Немного фотографий сборки

Заключение
В результате слаженной работы у нас получилось создать дистанционно-управляемого робота паука. Удалось приобрести новый опыт работы с железом, повторили электронику, а также научились немного конструировать.
Ссылки
GitHub проекта – https://github.com/TheAntag0nist/Arduino-Spider
Команда проекта
- Князюк Рюрик Александрович – тимлид, разработка электрической схемы, реализация минимального API, корпус, программа передачи команд с ПК (client-part)
- Умецкая Екатерина Романовна – модуль видеоанализа, модуль автономной работы, 2 часть лапы, модуль движения робота, разработка сайта управления
- Громов Сергей Вадимович – модуль отображения информации, модуль видеоанализа, 3 часть лапы, модуль движения робота, разработка сайта управления
- Киселев Тимофей Георгиевич – Разработка электрической схемы, модуль приема и отправки, реализация минимального API, 1 часть лапы, Модуль WiFi ESP8266
- Елисеенко Анастасия Владимировна – модуль обработки команд пользователя, модуль камеры, корпус